

Newsletter 2014.11 Index
Theme : "Mechanical Engineering Congress, 2014 Japan (MECJ-14) Part 1"
|
Technical subject of flow separation detection toward aerodynamic performance improvement of turbine blade
|


Abstract
Fiber Bragg grating (FBG) sensors and dielectric barrier discharge plasma actuators (DBD-PAs) have been developed for detection and control of flow separation in order to construct feedback control system on rotor blades of turbomachinery. Figure 1 shows the overview of our project in which their systems are mounted on 1kW-class windmill. Although DBD-PAs are expected to be devices for mitigating flow separation, electromagnetic noises and flow heated by DBD negatively affect the detections of flow separation by conventional flow sensors with electric circuits such as strain gauges. A feedback control of flow separation on NACA0024 airfoil (chord length: 80 mm) was demonstrated to detect flow separation by using FBG sensors in conjunction with DBD-PAs for Re = 5.3×104 in a blowdown wind tunnel as shown in Fig. 2(a). A string-type DBD-PA is embedded near the leading edge and tangential jets are induced along the suction surface toward the trailing edge (Fig. 2(b)). As shown in Fig. 2(c), cantilever structure is modelled on the pressure surface and its tip protrudes from the trailing edge to the suction surface. A FBG sensor attached on interior surface of the cantilever structure can detect strains of the cantilever root (Fig. 2(d)). Since the NACA0024 is fixed at angle of attack, α = 12o, flow separation occurs periodically by pulsating the movable wall.
Figure 3 shows Bragg wavelengths (λB) and their standard deviations (λB’) measured by the FBG sensor. In the case of without flow control (Figs. 3(a) and (b)), λB and λB’ fluctuate in sync with the wall pulsation. It was clarified by PIV analysis that flow separations occur when λB’ is larger than 0.003. On the other hand, Figs. 3(c) and (d) show λB and λB’ under the feedback control of flow separation. In this case, TTL signal is output to a power supply while λB’ is larger than 0.003, and high voltages is applied at high frequency for a certain time (ΔtDBD) between exposed and encapsulated electrodes of the DBD-PA. As a result, flow separation is drastically reduced because tangential jets are induced immediately from the DBD-PA once λB’ ≥ 0.003 is detected.
In addition, non-contact power transfer and optical signal transmission devices as shown in Fig. 4 have been developed to realize feedback control system of flow separation on rotor blades. Especially, it is necessary to create a fiber optic rotary joint (FORJ) which can transmit broadband lasers and reflected laser with Bragg wavelengths from FBG sensors between stationary and rotating locations. Since the optical fiber is disconnected within the FORJ, various laser transmission losses occur as illustrated in Fig. 4. In this study, two FORJs (prototype-1 and prototype-2) were tested to confirm whether they can measure reflected λB from two FBG sensors which are fixed on a rotating disk. The end faces of optical fibers disconnected within Prototype-1 FORJ are coated by antireflective (AR) film. On the other hand, optical fibers disconnected within Prototype-2 FORJ has flat and angled end faces. Figure 5 shows power of the peak wavelength, which corresponds to λB, reflected from the FBG sensors as a function of rotating angle (θ) of the rotating disk. Basic Bragg wavelengths of their FBG sensors are 1,540 nm and 1,550 nm, respectively. It was found that prototype-2 is suitable to measure λB in rotor as opposed to prototype-1 from which power of reflected laser light tends to vary in terms of θ.
Key words
Flow Separation, Active Flow Control, Fiber Bragg Grating, Fiber Optic Rotary Joint, Turbine Blade, Plasma Actuator
Figures
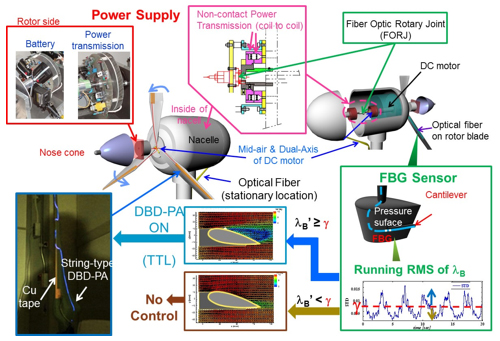
Fig.1 Overview of wind turbine project on feedback control of flow separation by using DBD plasma actuator and FBG sensor.
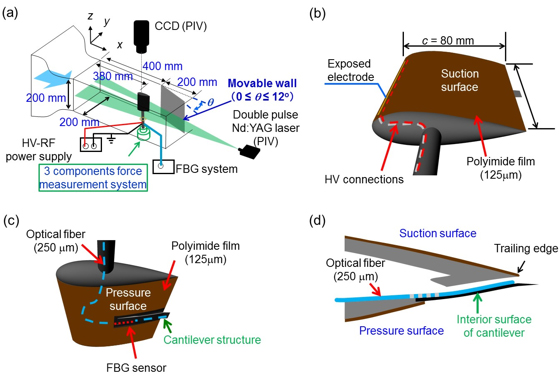
Fig.2 (a) Wind tunnel with movable wall, (b)DBD-PA located near the leading edge on suction surface of NACA0024, (c) cantilever structure modelled on pressure surface of NACA0024, (c) FBG sensor attached on interior surface of cantilever.
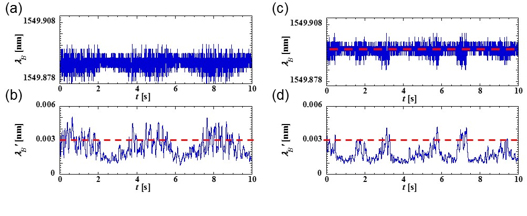
Fig.3 λB and λB’ measured by FBG sensor attached on interior surface (Fig. 2(d)) under periodic wall oscillation. (a), (b) Without flow control, (c), (d) with feedback control.
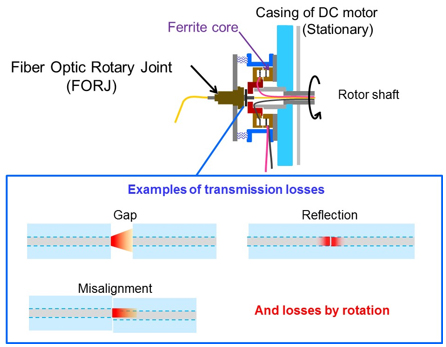
Fig.4 Examples of losses between end faces of optical fibers in FORJ.
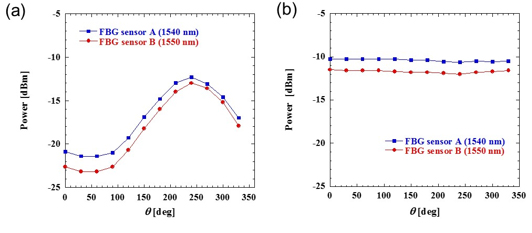
Fig.5 Reflected power from FBG sensor attached on rotor. (a) Prototype-1: FORJ with AR coated end faces, (b) Prototype-2: FORJ with flat and angled end faces.